R3-[Q-Shape] - Research
SailAway - Qualitative Calculi for Formalizing and Reasoning about Right-Of-Way Rules in Sea Navigation
Agents that have to solve navigational tasks need to consider aspects that go far beyond single-agent goal-directed deliberation: what an agent does in a specific situation often interferes with what other agents do at the same time. In order to avoid conflicts, collisions, and deadlock-like situations, situations in space are governed by laws, rules, and agreements between the involved agents (often situations are even governed by different rule sets). For this reason, artificial agents interacting with humans must be able to process such rule sets which mostly are formulated in purely qualitative terms.
Within the scope of this work that we are doing in cooperation with project R4-[LogoSpace], we investigate the application of qualitative spatial representation formalisms and reasoning (QSR) techniques to formalize right-of-way rules in sea navigation which determine actions based on spatial configurations. Qualitative representations allow us to mediate between metrical information perceivable to the agents and abstract conceptual knowledge expressed in the rule set.
Formalizations of rule sets can be employed in (at least) three different ways:
- Controlling an artificial agent: How can we define the behavior of an agent efficiently? How can we implement rule-compliant behavior?
- Judging an agent's behavior: Is the shown behavior rulecompliant?
- Evaluating rule sets: Is the rule set consistent? Is it optimal for specific tasks?
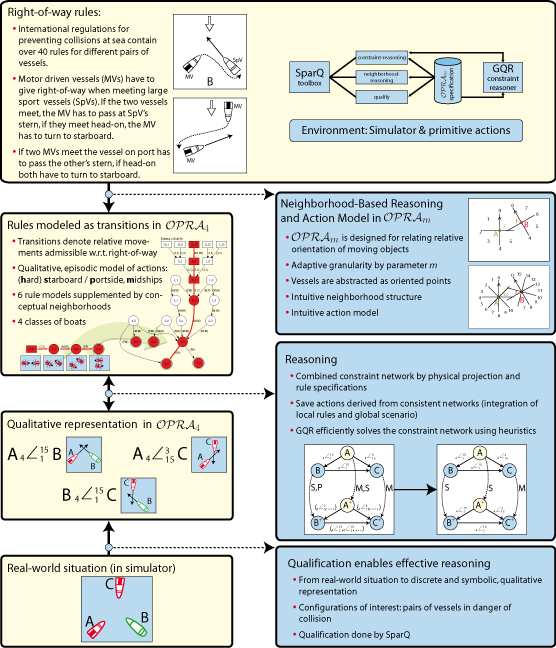
So far, we have focused on the problem of agent control. The right-of-way rules in sea navigation are local rules in the sense that they describe situations between exactly two boats. We combine constraint- and neighborhood-based reasoning methods in order to control multiple (>2) boats ensuring that no collision occurs.
We have developed a demonstrator consisting of a physical simulator, a visualizer, and a control module and utilizing our SparQ toolbox for the spatial reasoning part. Evalution and refinement of the approach is still ongoing work. The following illustration provides an overview on our approach: